eYantra Robotics Competition (eYRC)
Motivation

Natural disasters like earthquakes, and landslides cause immense human and economic losses globally. In 2018 alone, 315 such disasters, affecting over 68 million people and causing $131.7 billion in damages. Post-disaster, reconstruction efforts are essential, but they are capital and labor-intensive, especially in challenging terrains. The e-Yantra Robotics Competition (eYRC 2019-20) addresses this by introducing the theme “Construct-o-Bot” to aid disaster-stricken areas.
Theme - Construct-O-Bot
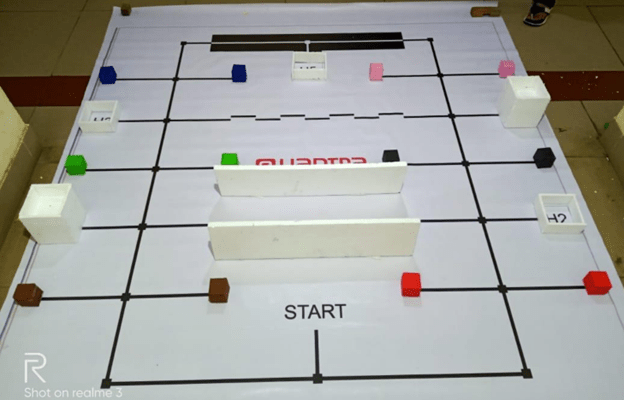
The “Construct-o-Bot” theme simulates a disaster site, where robots retrieve construction materials and navigate complex paths to deliver them for reconstruction. Using intelligent line-following and path-planning algorithms, these robots aim to reach their destination swiftly and safely, choosing the shortest routes. Success requires efficient delivery to multiple sites, including diverse terrains. The winning team completes the task swiftly with minimal penalties.
Objective
Design and implement a robotic system capable of efficiently and safely assisting in disaster site reconstruction, addressing challenges such as material handling, navigation, and sensor calibration.
Stage 1: Virtual Simulations
Code Testing - Vrep Robotic Simulator
In our project, we harnessed the power of V-rep, a versatile robotic simulator, to rigorously test our autonomous system. Leveraging embedded C, we expertly coded our robot, equipping it with proximity and white line sensors for robust perception. Implementing the renowned A* algorithm, our robot exhibited intelligent navigation in complex terrains. Our system excelled in precise object manipulation, emphasizing our dedication to automation and robotics in the industry.
Stage 2: Real Life Deployments
Task 2
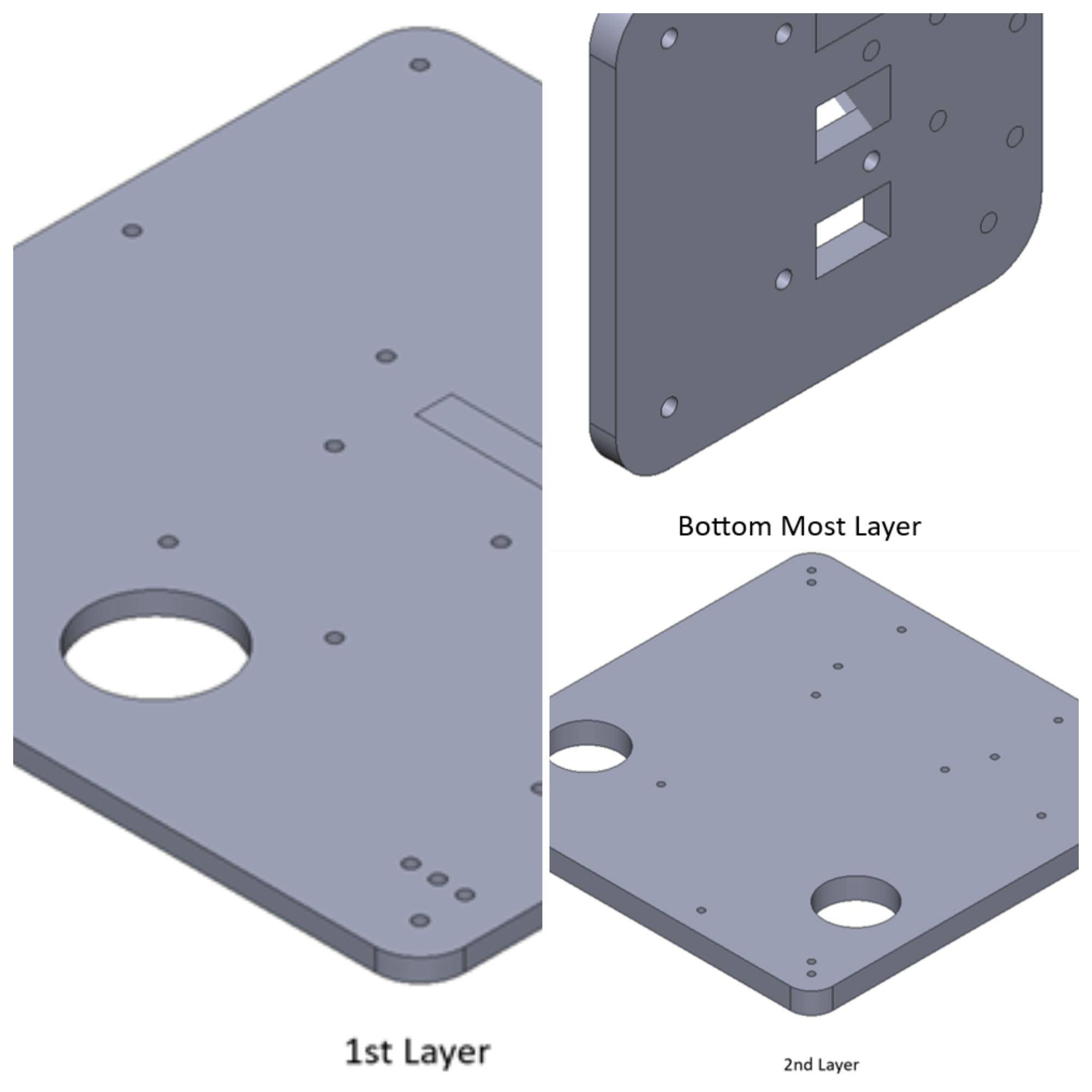
Solidworks Design and CNC Machining: In our project, SolidWorks was instrumental in designing precise 3D models. These designs were brought to life through a CNC machine, which meticulously carved acrylic sheets with precision. This synergy between design software and CNC technology ensured high-quality results in the engineering industry.
 |
 |
Critical Features of the Project
Electronics
| Category | Components |
|---|---|
| Sensors | Proximity Sensor/Sharp Sensor, White Line Sensor |
| Actuators | Geared DC Motor with Encoder, Servo Motors |
| Micro-Controllers | Atmega 2560 Development board |
| Miscellaneous | LCD, L298N Motor Driver, Buzzers, Potentiometers |
Actuations categorized based on sensors
| Sensors | Actions |
|---|---|
| White Line Sensor | Line Following, Node Detection, Black-White-Black Line Following & Zig Zag Line Following (Time Consuming & Not Effective) |
| Proximity Sensor | Wall Following & House/Block Detection |
| Servo Motor | Pick Blocks, Place Blocks at Different Heights (Low Rise & High Rise), 2 Servo Arm Design (Effective & Used) & 1 Servo Arm Design |
Task 3
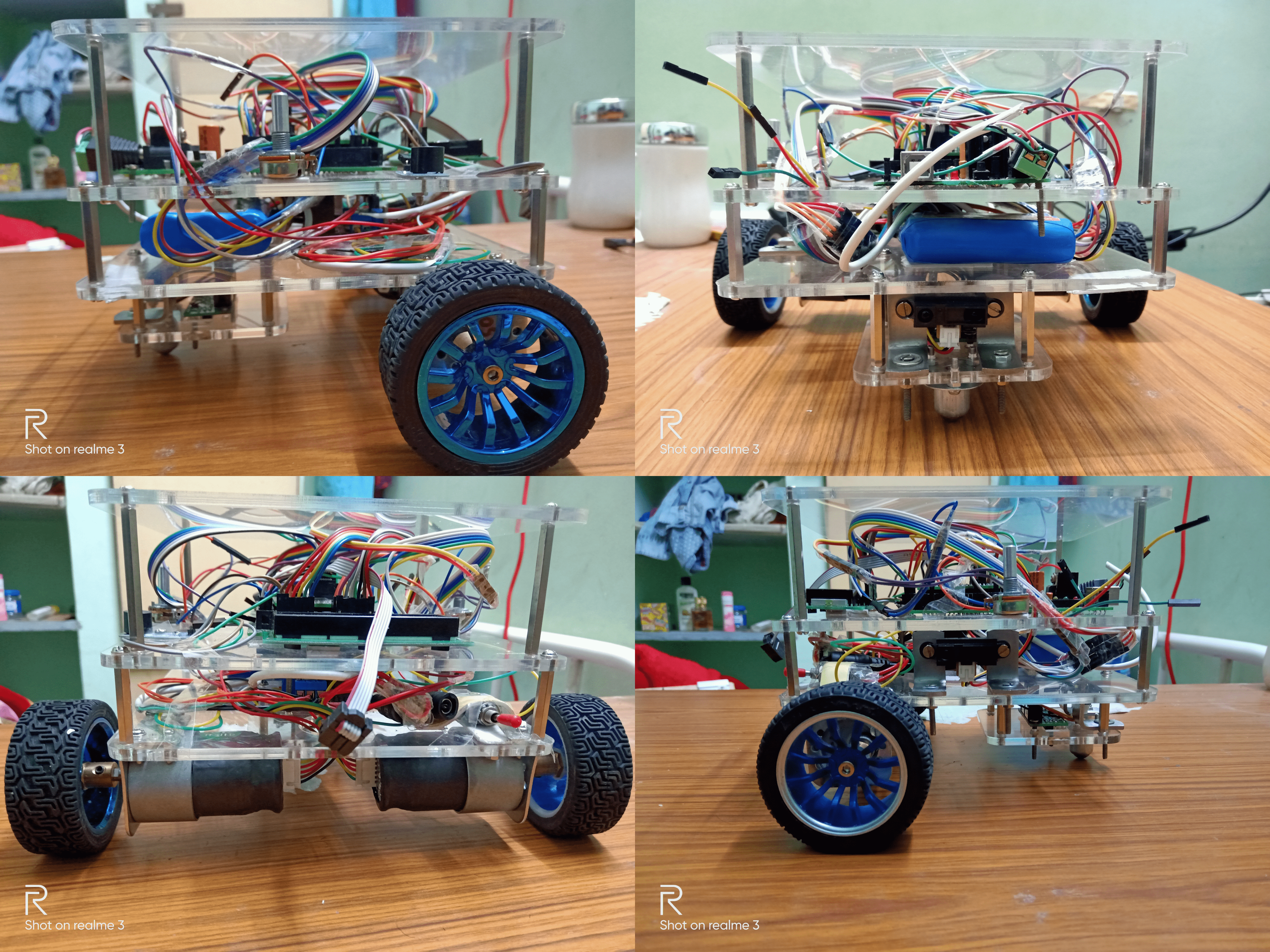
Transformed the 3D twin with Embedded C architecture and performed locomotion.
Hardware
-
Sensors
- Proximity Sensor/Sharp Sensor
- White Line Sensor
-
Actuators
- Geared DC Motor with Encoder
- Servo Motors
-
Micro-Controllers
- Atmega 2560 Development board
-
Miscellaneous
- LCD
- L298N Motor Driver
- Buzzers
- Potentiometers
Hardware Testing After Assembly
Task 4
Performed line and wall following locomotion and Executed 4 pick and place actions.
Task 5
Orchestrated 20 uninterrupted pick and place fully autonomous operations under 4 mins.
Algorthim Architecture
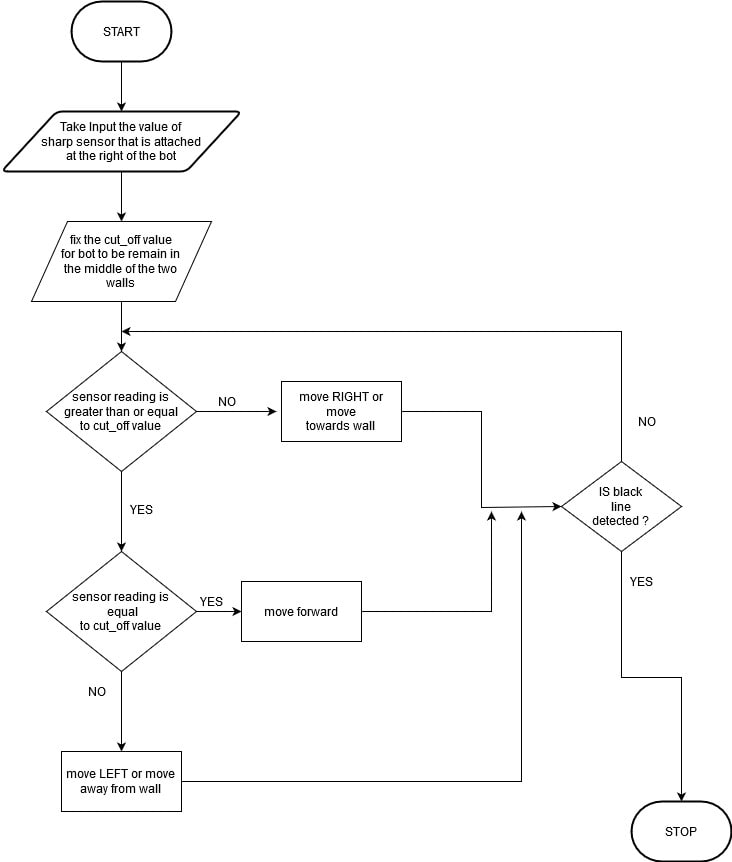
Wall Following Algorithm
Zig Zag Following Algorithm
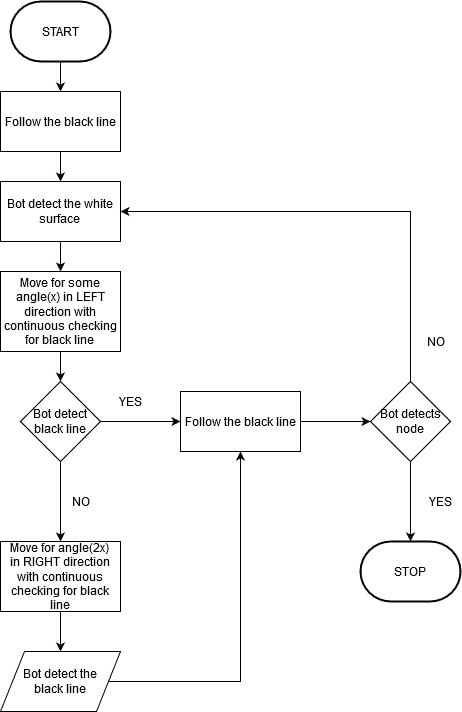
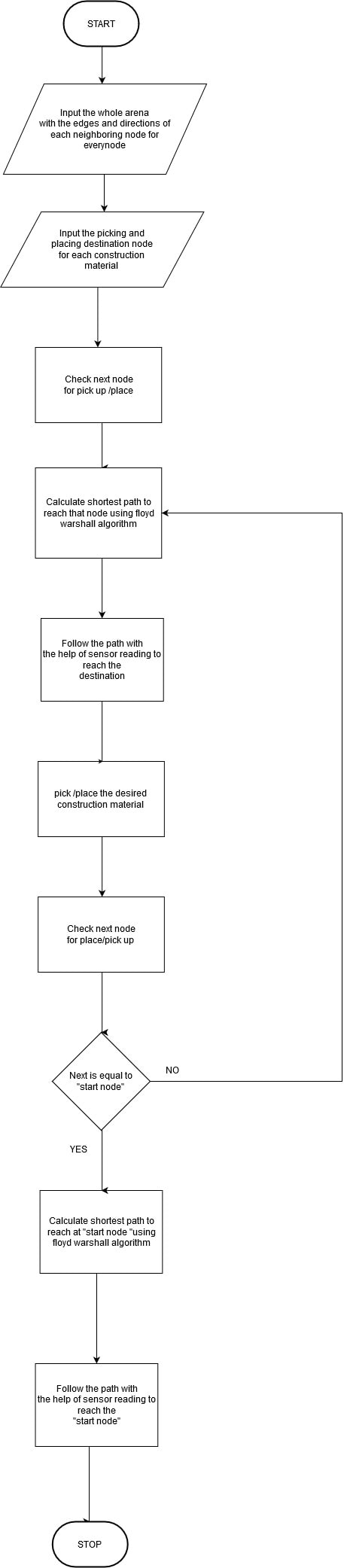
Full Competition Algorithm
Miscellaneous
Outcomes
1) National Finalists - IIT Bombay based Competition: My team consisted of Neeraj Gond, Nikhil Anand, Narendhiran Saravanane, and Neeraj Goyal. Led by Narendhiran, our team won the competition completeling the track in minimum time with no penalities! Click here to explore further & View my presentation to the Panel Members, Academic Experts, and Industry Leads here
2) Industry 4.0 I-4AM Conference - Indian Institute of Science, Banglore: Simulated Operations of the robot under medical environments and and presented an implemented case study for swift transporation and sanitation management. View my Presenter Certificate here & View my Conference Publication here.
{kind=link}
Retrofitting challenges & Learnings:
-
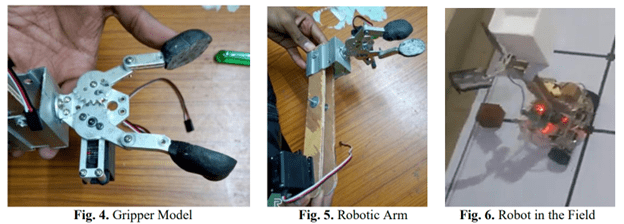
Gripper Misorientation: Fast robot movements caused gripper misorientation during material pickup, hindering simulation accuracy. The solution involved increasing gripper contact surface (Fig. 4 & 6).
-
Height Discrepancy: The robot’s 15cm height had to pick up material from a 3cm elevation. An L-shaped arm with servos for arm and gripper was implemented for cost-effectiveness (Fig. 5).
-
Sensor Data Optimization: LCD displays introduced lag during sensor calibration. Eliminating the LCD and using Tera-Term for serial communication resolved this issue.