Enhancement on Meta’s Research Work
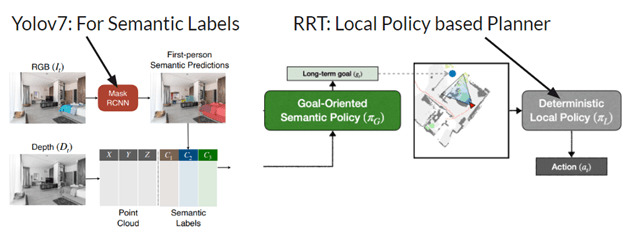
Enhanced Meta’s object goal navigation using Goal-Oriented Semantic Exploration, integrating Yolov7 and RRT. Implemented semantic mapping, goal-oriented policy, and deterministic local policy, outperforming baselines in exploration and planning. Achievements include improved success rates, SPL efficiency, and adaptability for real-world applications, contributing to the field of autonomous navigation. Technologies: Yolov7, RRT, semantic segmentation, Fast Marching Method, Python.
Proposed Changes
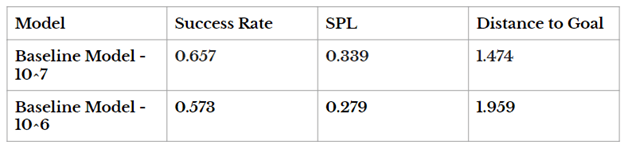
Results
Results: Baseline of the Paper
Enhancements on Computer Vision

Note: Baseline paper trains for 10M timesteps, our work runs for 1M due to time constraints
Wanna know more about this project? Blogged here