Home-Service Robot Project
The Home-Service Robot Project showcases a mobile robot’s autonomous navigation and manipulation in a simulated environment using ROS and Gazebo. Leveraging Gazebo’s Building and Model Editors, the project features a dynamic environment with advanced sensors integrated seamlessly. The robot autonomously chases a white ball, demonstrating robust ROS-based control. Accurate localization with AMCL and efficient mapping and navigation using gmapping and move_base highlight the project’s success in simulating cutting-edge robotics concepts.
Building Editor:
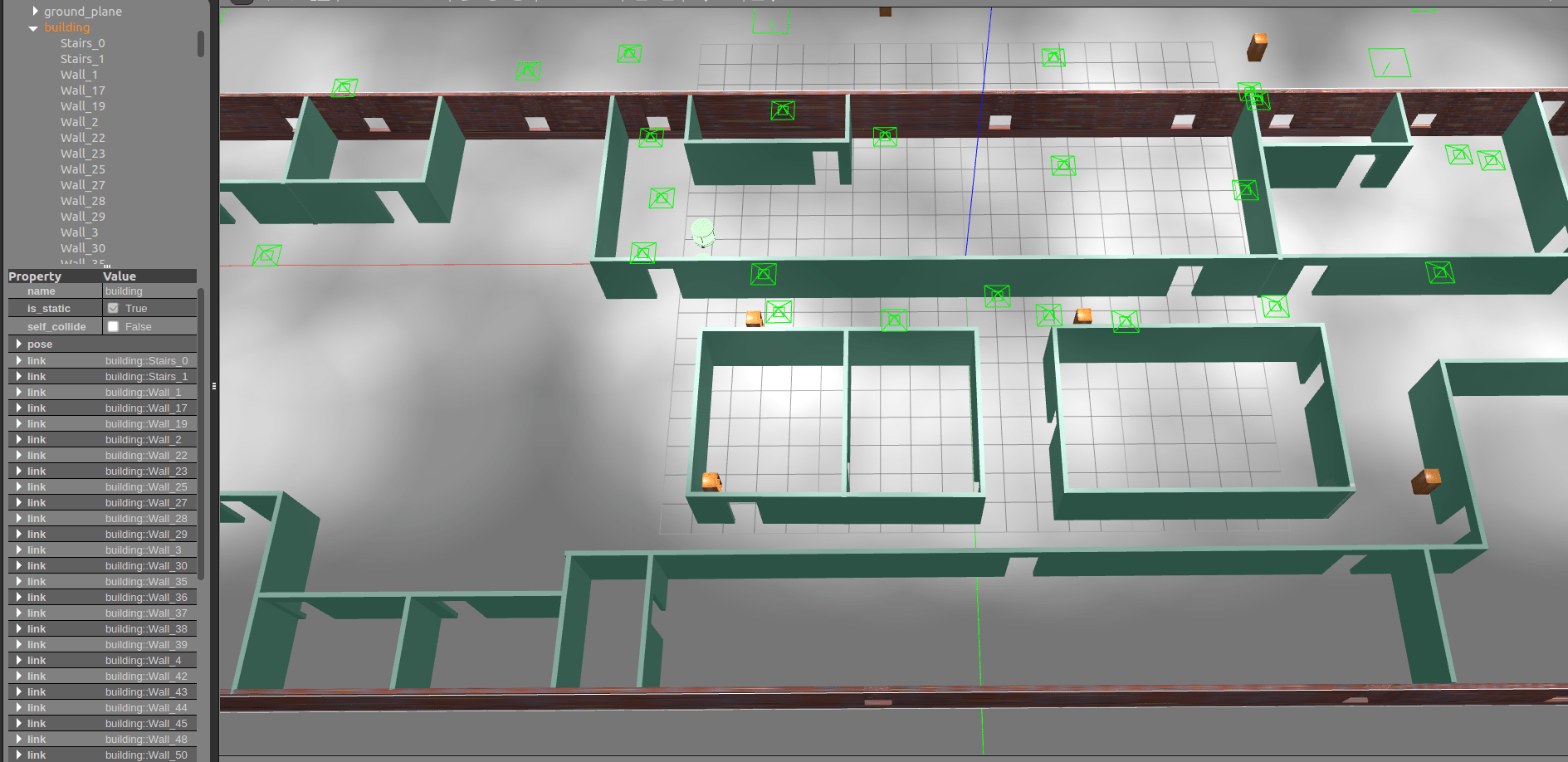
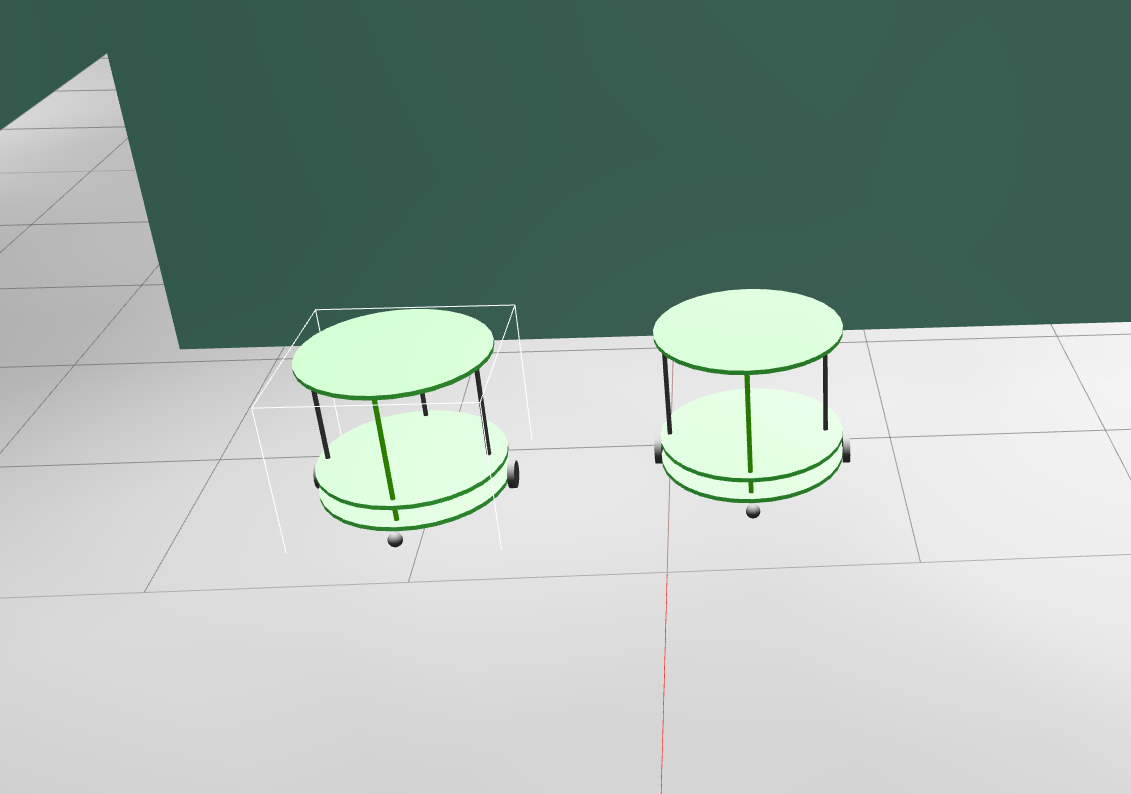
Variety of Models:
Autonomous Operation
Ball Chasing: A key highlight of the project is the robot’s ability to autonomously chase a white-colored ball within the environment. This impressive capability is achieved through the implementation of ROS nodes for interaction and navigation.
Precise Localization
AMCL Package: Accurate localization is fundamental to the robot’s autonomy. The project utilizes the Adaptive Monte Carlo Localization (AMCL) package, a particle filter-based algorithm.
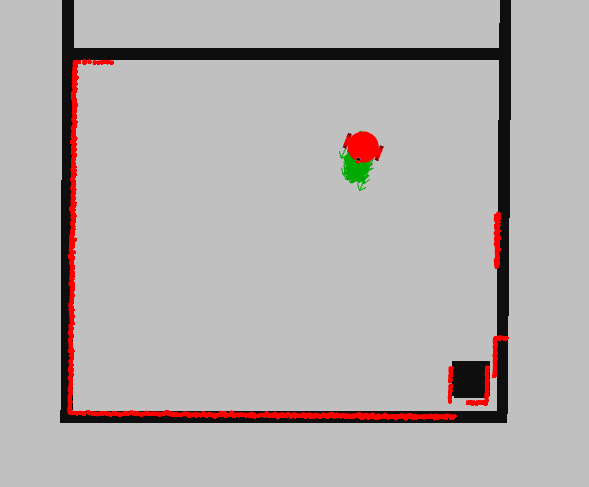
Mapping and Navigation
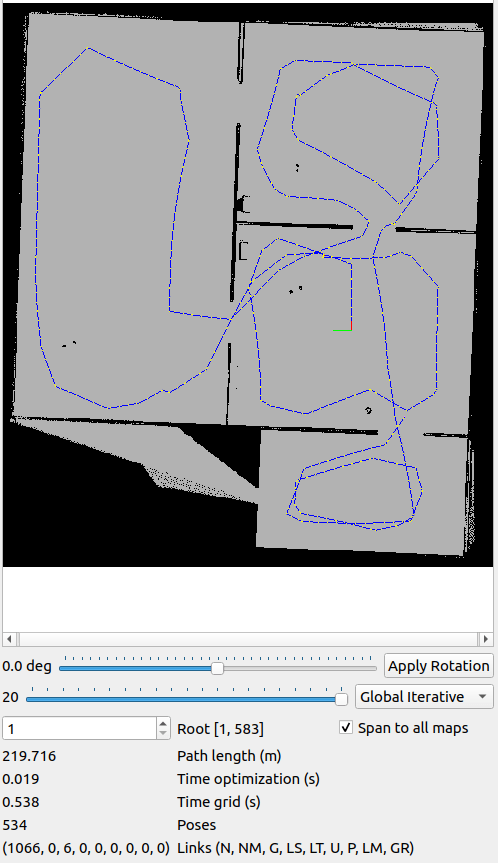
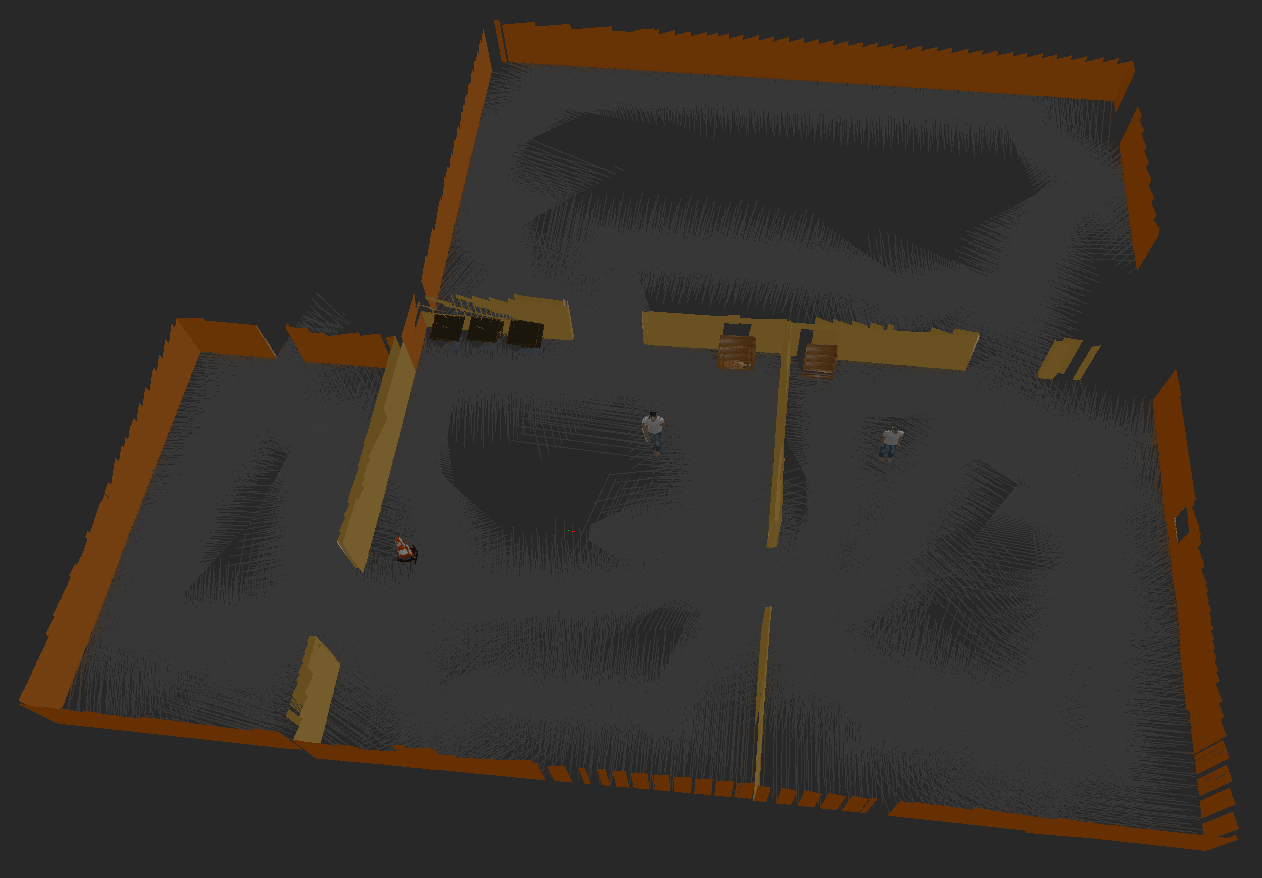
Gmapping and Move_Base Efficient mapping and navigation are achieved using the gmapping package for 2D occupancy grid mapping. This technology allows the robot to build and utilize maps for its autonomous movement. The move_base package serves as the high-level navigation controller, employing a combination of global and local path planning algorithms to enable obstacle avoidance and efficient goal attainment. Mapping Images:
 |
 |
Path Planning
Conclusion
The Home-Service Robot Project is a testament to the convergence of cutting-edge robotics concepts and technologies. It highlights the robot’s prowess in autonomous navigation, localization, and interaction within a simulated environment. This project showcases the immense potential of ROS and Gazebo for simulating and validating robotic systems.
Certificates and Achievements
Secured an excellent completion reward from the Udacity Team. Graduation Credential