eYantra Robotics Competition
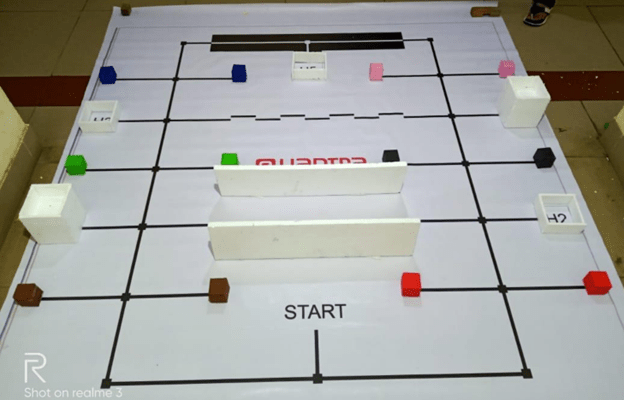
Theme - Construct-O-Bot Objective: This theme simulates a disaster site, where robots retrieve construction materials and navigate complex paths to deliver them for reconstruction. Success requires efficient delivery to multiple sites, including diverse terrains. The winning team completes the task swiftly with minimal penalties.
Outcomes
1) National Finalists - IIT Bombay based Competition: My team consisted of Neeraj Gond, Nikhil Anand, Narendhiran Saravanane, and Neeraj Goyal. Led by Narendhiran, our team won the competition completeling the track in minimum time with no penalities! Click here to explore further & View my presentation to the Panel Members, Academic Experts, and Industry Leads here
2) Industry 4.0 I-4AM Conference - Indian Institute of Science, Banglore: Simulated Operations of the robot under medical environments and and presented an implemented case study for swift transporation and sanitation management. View my Presenter Certificate here & View my Conference Publication here.
{kind=link}
Demo
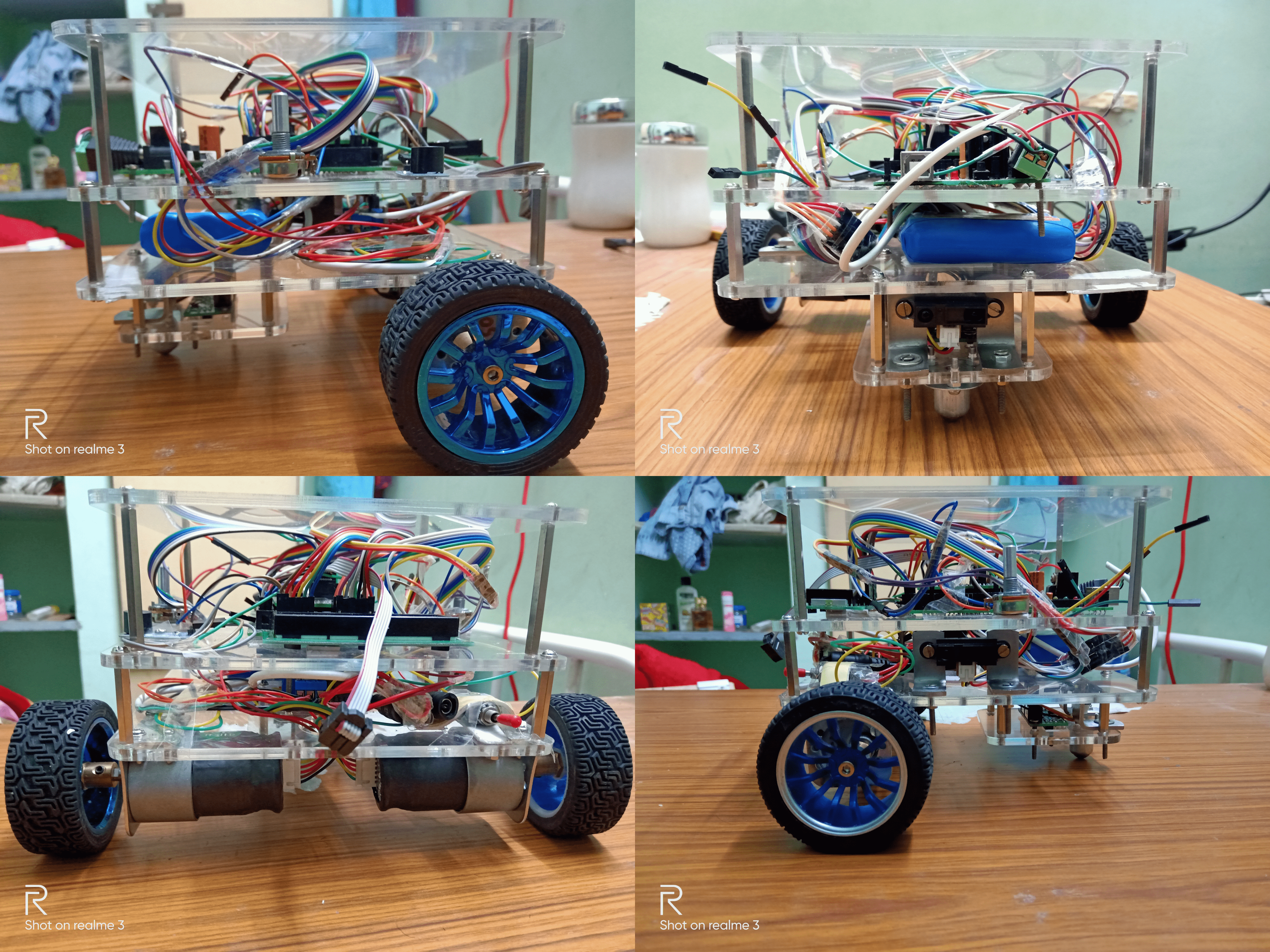
Robot Real Life Design: Projections
Vrep Robotic Simulator
Real Life Simulations
Retrofitting challenges:
-
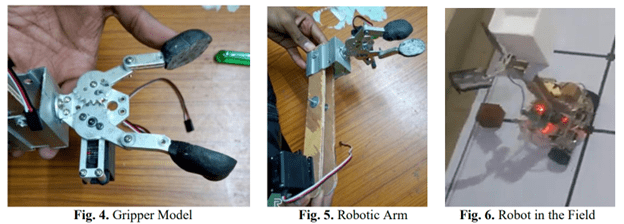
Gripper Misorientation: Fast robot movements caused gripper misorientation during material pickup, hindering simulation accuracy. The solution involved increasing gripper contact surface (Fig. 4 & 6).
-
Height Discrepancy: The robot’s 15cm height had to pick up material from a 3cm elevation. An L-shaped arm with servos for arm and gripper was implemented for cost-effectiveness (Fig. 5).
-
Sensor Data Optimization: LCD displays introduced lag during sensor calibration. Eliminating the LCD and using Tera-Term for serial communication resolved this issue