Improved Safety Control for Autonomous Driving using GPT (LLMs) - Case Study
Problem Statement
An open-source platform, Carla Simulator that facilitates tackling the complexities of autonomous driving by enhancing safety and scene perception. Autonomous driving safety is hindered by unexpected behaviors in dense traffic. Enhanced Safety control using multi-domain skilled GPT to make decision for better decision making process.
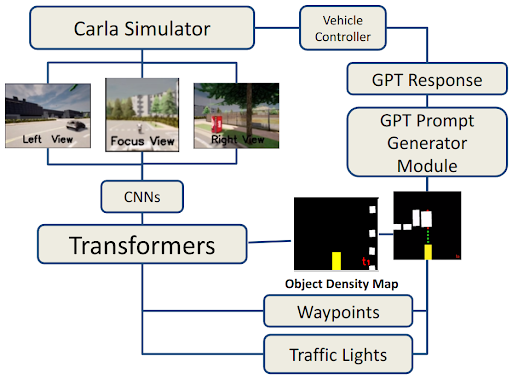
Designed LLM cum Autonomous Driving Pipeline
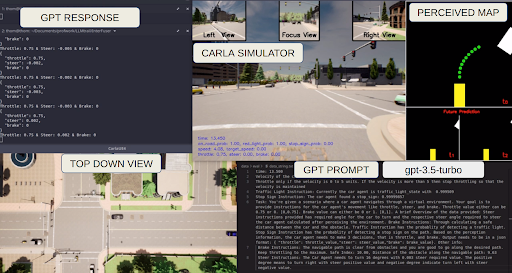
Simulator Representation
Results
Unexpected Overtaking - Rash Drivers
Smart Lane Change Actions for taking Free-Right
Environment Aware Decision making for Collision Avoidance
Overtaking Obstacle
Challenges & Future Research Work
Uncertain Decision Making at Long Curved Track
Lacking Long Term Decision considering time taken to cross the intersection
Reference
- For Capstone project Poster, Click here
- Baseline project’s repository, Interfuser
- For Linkedin Post, Click here